Herkese Merhaba,
Sizlere Arduino için kullanılan servo.h kütüphanesi hakkında bilgi vereceğim ve servo motorun arduino ile kontrolünü paylaşacağım.
Öncelikle servo motoru tanımlamak gerekirse; Servo motorlar kullanıcının komutlarını yerine getiren motorlardır. Komutlar, pozisyon ve hız komutları veya hız ve pozisyonun birleşimi olabilir. 3 girişi bulunur. Bunlar güç, toprak ve sinyal girişleridir.
Arduino'nun servo.h kütüphanesini kullanarak servo motorları kontrol edebiliriz. Bu kütüphaneden kullandığımız bazı fonksiyonlara değineceğim.
servomotor.attach(pin) fonksiyonunda servo motorun hangi pinden sinyal alacağını belirleriz.
servomotor.write(pos); fonksiyonunda servo motorun açısını ayarlamak için kullanılır.
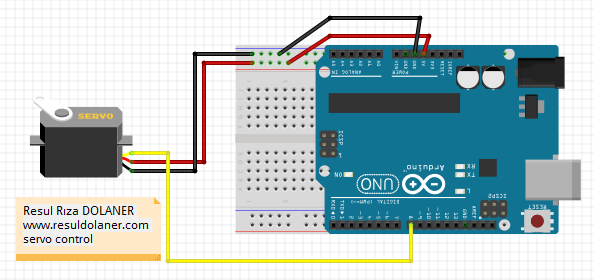
Bağlantı Şeması :
Arduino Kodları:
#include <Servo.h>
Servo myservomotor; // sınıfın bir örneğini aldık
void setup()
{
myservomotor.attach(8); // arduinonun 8. pinini çıkış yaptık.
myservomotor.write(0); // motora ilk 0.derecesinden başlaması komutunu verdik
}
void loop()
{
for(int derece = 0; derece < 180; derece++){ // 180 derecelik açı yap
myservomotor.write(derece);
delay(10); // her 1 derece açıyı 10 milisaniyede yapacak
}
for(int derece = 180; derece > 1; derece–){ // tam tersi yönünde açı yap
myservomotor.write(derece);
delay(10);
}
}